With the construction of smart mines, unmanned electric locomotives are being recognized by more and more mining companies. The implementation of the unmanned driving system can reduce the level of transportation personnel, including underground electric locomotive drivers and pass miners. One person in the underground control room can supervise the operation of multiple vehicles, improve the labor environment, increase equipment operating time, increase production capacity , To reach the level of intrinsic safety, truly achieve the goal of mechanized substitution and automated reduction of personnel.
1.Locomotive unmanned operation control technology
The on-board controller receives instructions from the remote control center system through the network, automatically adjusts the start, acceleration, uniform speed, deceleration, brake stagnation, stop, raising/lowering bow, etc. of the locomotive, feeds back the execution results to the ground control center.
2.Variable speed cruise technology for autonomous locomotive operation
Based on the principle of constant speed cruise, a vehicle variable speed cruise model (adaptive cruise model) is established. According to the driving instructions issued by the production optimization scheduling software model, combined with the objective distribution of the track/road, that is the situation of the straight curve ahead, whether it is necessary to avoid, etc., it realizes the driving adaptive track and dispatching instructions, autonomously adjust the driving speed and make the loading -> Walking -> The whole process of unloading ore reaches autonomous operation.
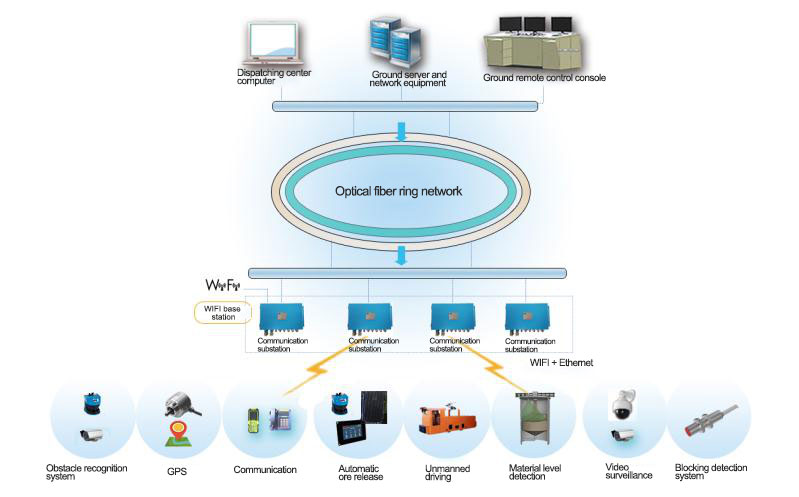
3.Highly reliable communication redundancy technology
It integrates locomotive mobile video, data collection and dispatch command transmission. It is an important channel connecting the locomotive and the ground control center. It uses a combination of wired, wireless and multiple wireless redundant broadband network designs.
4.Material level monitoring technology
The laser measurement method is adopted to automatically detect the ore material level in the pass. On the one hand, it controls the unloading of the pass, on the other hand commands and dispatches the locomotive to load the ore. Automatically detect and dispatch the mine pit to maintain a certain height of material level to ensure the safety of the crushing station below.
5.Accurate positioning of locomotive
The use of multiple technical means to accurately locate locomotives is a prerequisite for unmanned driving. The acceleration and deceleration of straight curves are the basis of automatic mine dumping, locomotive scheduling and turnout control.
1.Multi-locomotive optimization intelligent dispatching technology
Together with the automatic control of Xinji closed turnouts, real-time optimization of calculations and scheduling of the operation of underground locomotives ensure that the operation of locomotives is more efficient, so that within 8 hours of each shift, the time for production work is the most, the time waiting for avoidance is the least.
2.Automatic loading technology
The automatic ore loading system is installed at the ore-drawing position of each chute. When the locomotive approaches and the current ore-loading system receives the ore-loading instruction from the dispatch center, the automatic ore-loading system will automatically control the ore-drawing machine according to the adjustable ore-drawing parameters. Automatic ore loading.
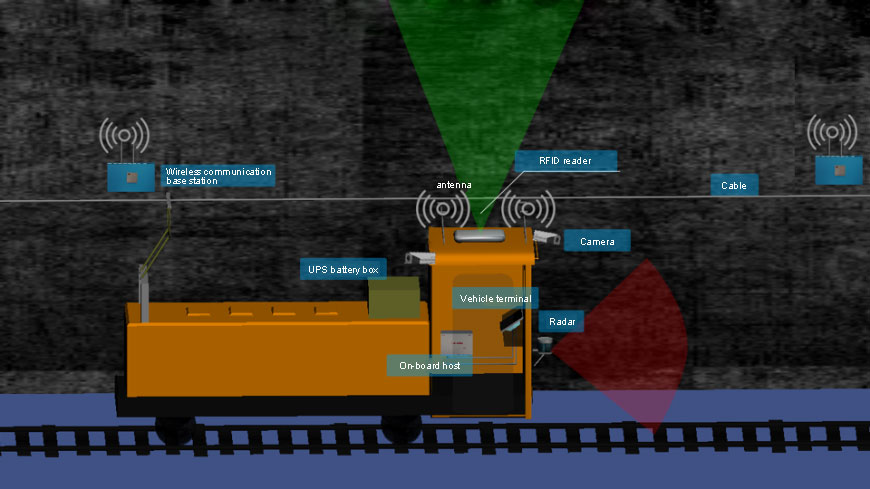
1.Automatic recognition of track obstacles and locomotive anti-collision technology
Establish a three-dimensional model of straight roads and curves in underground mines, match the three-dimensional model with the scanning of the front detection radar, combine with the automatic recognition of the locomotive video to detect whether there are people on the track ahead, whether there are other equipment, whether there is sufficient safety between the locomotives, If necessary, take automatic emergency braking to achieve autonomous safety.
2.Safety Emergency Guarantee System
Under normal circumstances, the control center system dispatches and directs the operation of the entire underground locomotive. If there is a failure, it must be controlled by the emergency support system, an underground emergency tunnel has been established to ensure the safety of the locomotive and various underground equipment and facilities.
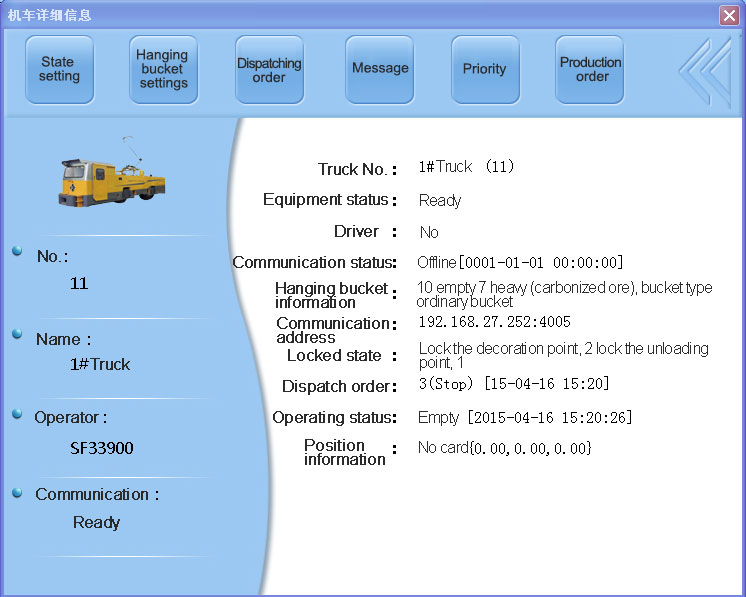
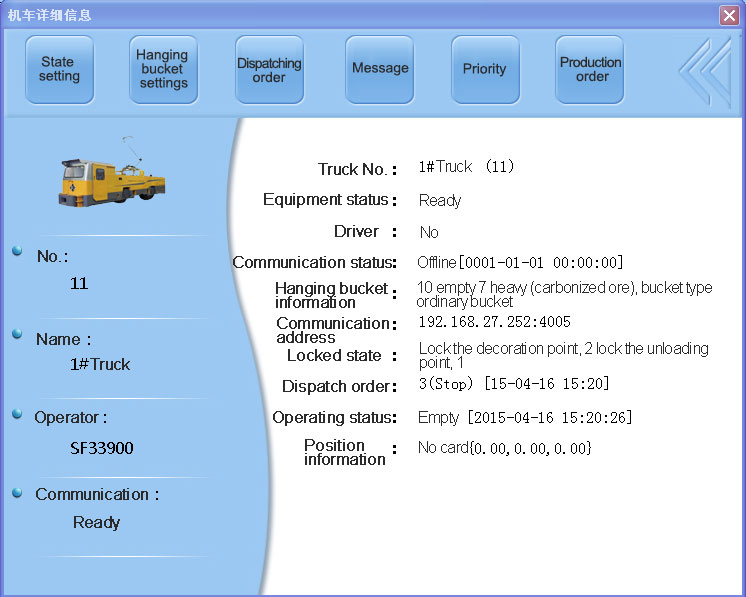
3.Locomotive and equipment's own health monitoring technology
The vehicle-mounted terminal collects the data of the various systems of the vehicle in real time, automatically analyzes whether the various indicators of the locomotive are normal, only normal locomotives can be put into operation. Not only the locomotive, but all related equipment in the system have this function, including mining machines, signal collection and closing, communication equipment, etc.
In terms of security:
1.Increase the radar obstacle detection function in front of the vehicle to realize active safety protection.
2.The remote power-off function is added to the mining machine system, the power will be cut off when the problem occurs to prevent the mine from running out of the chute.
3.Add 4G private network to realize dual network redundancy and prevent the locomotive from being disconnected and out of control.
4.Increase the large block detection function, automatically detect, stop and alarm when large blocks occur.
5.Increase the detection function of the material level of the mine cart to prevent the material level from falling over the mine and prevent the line from hanging.
6.Add material level detection and mine car compaction detection at the unloading shaft to prevent safety problems during the unloading process.
In terms of automation and labor:
7.Realize automatic ore loading, no need to remotely release ore, saving manpower.
8.Realize the automatic measurement of the track scale, no need to remotely drive the measurement, saving manpower.
9.When unhooking and hooking in the flat tunnel, the operator can realize the close-range remote control of the electric locomotive through the remote control, which saves manpower.
10.Realize autonomous cruise of electric locomotive, combined with active radar obstacle detection, no need for remote control operation, saving manpower.
Social benefits:
1.Unmanned driving and unmanned mining to achieve intrinsic safety;
2.Reduce production accidents caused by human factors;
3.Reduce work-related accidents and reduce the probability of occupational diseases;
4.Improve the working environment to free the electric locomotive position from the dark, humid and dusty environment in the underground;
5.Improve the level of enterprise automation and informatization, thereby improving the level of production management of the enterprise.
Economic benefits:
1.Achieve better ore allocation through optimized design;
2.Reduce the cost of human resources;
3.Improve transportation efficiency and benefit;
4.Ensure the stable quality of ore;
5.Reduce economic losses caused by human operations;
6.Reduce equipment maintenance costs.













